
eBPF.md 14 KB
eBPF
作者: 陈林峰
Email: [email protected]
概述
eBPF 是一项革命性的技术,起源于 Linux 内核,它可以在特权上下文中(如操作系统内核)运行沙盒程序。它用于安全有效地扩展内核的功能,而无需通过更改内核源代码或加载内核模块的方式来实现。
从历史上看,由于内核具有监督和控制整个系统的特权,操作系统一直是实现可观测性、安全性和网络功能的理想场所。同时,由于操作系统内核的核心地位和对稳定性和安全性的高要求,操作系统内核很难快速迭代发展。因此在传统意义上,与在操作系统本身之外实现的功能相比,操作系统级别的创新速度要慢一些。
eBPF 从根本上改变了这个方式。通过允许在操作系统中运行沙盒程序的方式,应用程序开发人员可以运行 eBPF 程序,以便在运行时向操作系统添加额外的功能。然后在 JIT 编译器和验证引擎的帮助下,操作系统确保它像本地编译的程序一样具备安全性和执行效率。这引发了一股基于 eBPF 的项目热潮,它们涵盖了广泛的用例,包括下一代网络实现、可观测性和安全功能等领域。
eBPF In DragonOS
在一个新的OS上添加eBPF的支持需要了解eBPF的运行过程,通常,eBPF需要用户态工具和内核相关基础设施配合才能发挥其功能。而新的OS通常会兼容Linux上的应用程序,这可以进一步简化对用户态工具的移植工作,只要内核实现相关的系统调用和功能,就可以配合已有的工具完成eBPF的支持。
eBPF的运行流程
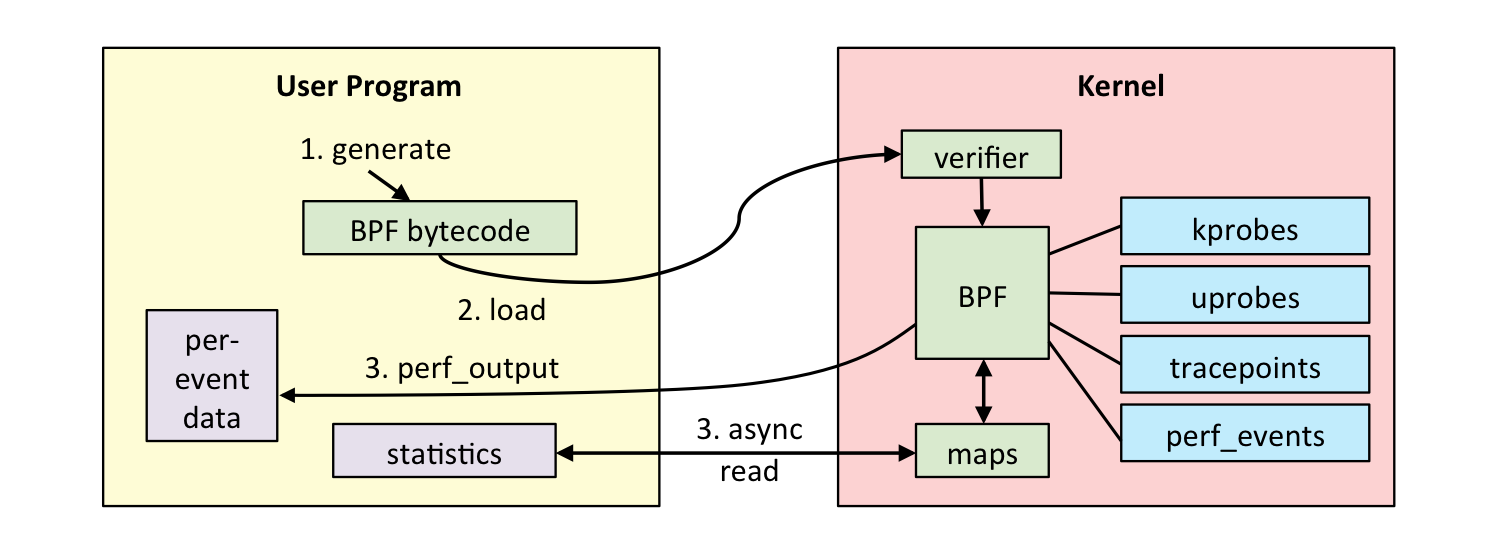
如图所示,eBPF程序的运行过程分为三个主要步骤:
- 源代码->二进制
- 用户可以使用python/C/Rust编写eBPF程序,并使用相关的工具链编译源代码到二进制程序
- 这个步骤中,用户需要合理使用helper函数丰富eBPF程序功能
- 加载eBPF程序
- 用户态的工具库会封装内核提供的系统调用接口,以简化用户的工作。用户态工具对eBPF程序经过预处理后发出系统调用,请求内核加载eBPF程序。
- 内核首先会对eBPF程序进行验证,检查程序的正确性和合法性,同时也会对程序做进一步的处理
- 内核会根据用户请求,将eBPF程序附加到内核的挂载点上(kprobe/uprobe/trace_point)
- 在内核运行期间,当这些挂载点被特定的事件触发, eBPF程序就会被执行
- 数据交互
- eBPF程序可以收集内核的信息,用户工具可以选择性的获取这些信息
- eBPF程序可以直接将信息输出到文件中,用户工具通过读取和解析文件中的内容拿到信息
- eBPF程序通过Map在内核和用户态之间共享和交换数据
用户态支持
用户态的eBPF工具库有很多,比如C的libbpf,python的bcc, Rust的Aya,总体来说,这些工具的处理流程都大致相同。DragonOS当前支持Aya框架编写的eBPF程序,以Aya为例,用户态的工具的处理过程如下:
- 提供eBPF使用的helper函数和Map抽象,方便实现eBPF程序
- 处理编译出来的eBPF程序,调用系统调用创建Map,获得对应的文件描述符
- 根据需要,更新Map的值(.data)
- 根据重定位信息,对eBPF程序的相关指令做修改
- 根据内核版本,对eBPF程序中的bpf to bpf call进行处理
- 加载eBPF程序到内核中
- 对系统调用封装,提供大量的函数帮助访问eBPF的信息并与内核交互
DragonOS对Aya 库的支持并不完整。通过对Aya库的删减,我们实现了一个较小的tiny-aya。为了确保后期对Aya的兼容,tiny-aya只对Aya中的核心工具aya做了修改,其中一些函数被禁用,因为这些函数的所需的系统调用或者文件在DragonOS中还未实现。
Tokio
Aya需要使用异步运行时,通过增加一些系统调用和修复一些错误DragonOS现在已经支持基本的tokio运行时。
使用Aya创建eBPF程序
与Aya官方提供的文档所述,只需要根据其流程安装对应的Rust工具链,就可以按照模板创建eBPF项目。以当前实现的syscall_ebf为例,这个程序的功能是统计系统调用的次数,并将其存储在一个HashMap中。
├── Cargo.toml
├── README.md
├── syscall_ebpf
├── syscall_ebpf-common
├── syscall_ebpf-ebpf
└── xtask
在user/app目录中,项目结构如上所示:
syscall_ebpf-ebpf是 eBPF代码的实现目录,其会被编译到字节码syscall_ebpf-common是公共库,方便内核和用户态进行信息交互syscall_ebpf是用户态程序,其负责加载eBPF程序并获取eBPF程序产生的数据xtask是一个命令行工具,方便用户编译和运行用户态程序
为了在DragonOS中运行用户态程序,暂时还不能直接使用模板创建的项目:
- 这个项目不符合DragonOS对用户程序的项目结构要求,当然这可以通过稍加修改完成
因为DragonOS对tokio运行时的支持还不是完整体,需要稍微修改一下使用方式
#[tokio::main(flavor = "current_thread")] async fn main() -> Result<(), Box<dyn Error>> {因为对Aya支持不是完整体,因此项目依赖的aya和aya-log需要换成tiny-aya中的实现。
[dependencies] aya = { git = "https://github.com/DragonOS-Community/tiny-aya.git" } aya-log = { git = "https://github.com/DragonOS-Community/tiny-aya.git" }
只需要稍加修改,就可以利用Aya现有的工具完成eBPF程序的实现。
内核态支持
内核态支持主要为三个部分:
- kprobe实现:位于目录
kernel/crates/kprobe - rbpf运行时:位于目录
kernel/crates/rbpf - 系统调用支持
- helper函数支持
rbpf
由于rbpf之前只是用于运行一些简单的eBPF程序,其需要通过一些修改才能运行更复杂的程序。
- 增加bpf to bpf call 的支持:通过增加新的栈抽象和保存和恢复必要的寄存器数据
- 关闭内部不必要的内存检查,这通常由内核的验证器完成
- 增加带所有权的数据结构避免生命周期的限制
系统调用
eBPF相关的系统调用都集中在bpf() 上,通过参数cmd来进一步区分功能,目前对其支持如下:
pub fn bpf(cmd: bpf_cmd, attr: &bpf_attr) -> Result<usize> {
let res = match cmd {
// Map related commands
bpf_cmd::BPF_MAP_CREATE => map::bpf_map_create(attr),
bpf_cmd::BPF_MAP_UPDATE_ELEM => map::bpf_map_update_elem(attr),
bpf_cmd::BPF_MAP_LOOKUP_ELEM => map::bpf_lookup_elem(attr),
bpf_cmd::BPF_MAP_GET_NEXT_KEY => map::bpf_map_get_next_key(attr),
bpf_cmd::BPF_MAP_DELETE_ELEM => map::bpf_map_delete_elem(attr),
bpf_cmd::BPF_MAP_LOOKUP_AND_DELETE_ELEM => map::bpf_map_lookup_and_delete_elem(attr),
bpf_cmd::BPF_MAP_LOOKUP_BATCH => map::bpf_map_lookup_batch(attr),
bpf_cmd::BPF_MAP_FREEZE => map::bpf_map_freeze(attr),
// Program related commands
bpf_cmd::BPF_PROG_LOAD => prog::bpf_prog_load(attr),
// Object creation commands
bpf_cmd::BPF_BTF_LOAD => {
error!("bpf cmd {:?} not implemented", cmd);
return Err(SystemError::ENOSYS);
}
ty => {
unimplemented!("bpf cmd {:?} not implemented", ty)
}
};
res
}
其中对创建Map命令会再次细分,以确定具体的Map类型,目前我们对通用的Map基本添加了支持:
bpf_map_type::BPF_MAP_TYPE_ARRAY
bpf_map_type::BPF_MAP_TYPE_PERCPU_ARRAY
bpf_map_type::BPF_MAP_TYPE_PERF_EVENT_ARRAY
bpf_map_type::BPF_MAP_TYPE_HASH
bpf_map_type::BPF_MAP_TYPE_PERCPU_HASH
bpf_map_type::BPF_MAP_TYPE_QUEUE
bpf_map_type::BPF_MAP_TYPE_STACK
bpf_map_type::BPF_MAP_TYPE_LRU_HASH
bpf_map_type::BPF_MAP_TYPE_LRU_PERCPU_HASH
bpf_map_type::BPF_MAP_TYPE_CPUMAP
| bpf_map_type::BPF_MAP_TYPE_DEVMAP
| bpf_map_type::BPF_MAP_TYPE_DEVMAP_HASH => {
error!("bpf map type {:?} not implemented", map_meta.map_type);
Err(SystemError::EINVAL)?
}
所有的Map都会实现定义好的接口,这个接口参考Linux的实现定义:
pub trait BpfMapCommonOps: Send + Sync + Debug + CastFromSync {
/// Lookup an element in the map.
///
/// See https://ebpf-docs.dylanreimerink.nl/linux/helper-function/bpf_map_lookup_elem/
fn lookup_elem(&mut self, _key: &[u8]) -> Result<Option<&[u8]>> {
Err(SystemError::ENOSYS)
}
/// Update an element in the map.
///
/// See https://ebpf-docs.dylanreimerink.nl/linux/helper-function/bpf_map_update_elem/
fn update_elem(&mut self, _key: &[u8], _value: &[u8], _flags: u64) -> Result<()> {
Err(SystemError::ENOSYS)
}
/// Delete an element from the map.
///
/// See https://ebpf-docs.dylanreimerink.nl/linux/helper-function/bpf_map_delete_elem/
fn delete_elem(&mut self, _key: &[u8]) -> Result<()> {
Err(SystemError::ENOSYS)
}
/// For each element in map, call callback_fn function with map,
/// callback_ctx and other map-specific parameters.
///
/// See https://ebpf-docs.dylanreimerink.nl/linux/helper-function/bpf_for_each_map_elem/
fn for_each_elem(&mut self, _cb: BpfCallBackFn, _ctx: *const u8, _flags: u64) -> Result<u32> {
Err(SystemError::ENOSYS)
}
/// Look up an element with the given key in the map referred to by the file descriptor fd,
/// and if found, delete the element.
fn lookup_and_delete_elem(&mut self, _key: &[u8], _value: &mut [u8]) -> Result<()> {
Err(SystemError::ENOSYS)
}
/// perform a lookup in percpu map for an entry associated to key on cpu.
fn lookup_percpu_elem(&mut self, _key: &[u8], cpu: u32) -> Result<Option<&[u8]>> {
Err(SystemError::ENOSYS)
}
/// Get the next key in the map. If key is None, get the first key.
///
/// Called from syscall
fn get_next_key(&self, _key: Option<&[u8]>, _next_key: &mut [u8]) -> Result<()> {
Err(SystemError::ENOSYS)
}
/// Push an element value in map.
fn push_elem(&mut self, _value: &[u8], _flags: u64) -> Result<()> {
Err(SystemError::ENOSYS)
}
/// Pop an element value from map.
fn pop_elem(&mut self, _value: &mut [u8]) -> Result<()> {
Err(SystemError::ENOSYS)
}
/// Peek an element value from map.
fn peek_elem(&self, _value: &mut [u8]) -> Result<()> {
Err(SystemError::ENOSYS)
}
/// Freeze the map.
///
/// It's useful for .rodata maps.
fn freeze(&self) -> Result<()> {
Err(SystemError::ENOSYS)
}
/// Get the first value pointer.
fn first_value_ptr(&self) -> *const u8 {
panic!("value_ptr not implemented")
}
}
联通eBPF和kprobe的系统调用是perf_event_open,这个系统调用在Linux中非常复杂,因此Dragon中并没有按照Linux进行实现,目前只支持其中两个功能:
match args.type_ {
// Kprobe
// See /sys/bus/event_source/devices/kprobe/type
perf_type_id::PERF_TYPE_MAX => {
let kprobe_event = kprobe::perf_event_open_kprobe(args);
Box::new(kprobe_event)
}
perf_type_id::PERF_TYPE_SOFTWARE => {
// For bpf prog output
assert_eq!(args.config, perf_sw_ids::PERF_COUNT_SW_BPF_OUTPUT);
assert_eq!(
args.sample_type,
Some(perf_event_sample_format::PERF_SAMPLE_RAW)
);
let bpf_event = bpf::perf_event_open_bpf(args);
Box::new(bpf_event)
}
}
- 其中一个
PERF_TYPE_SOFTWARE是用来创建软件定义的事件,PERF_COUNT_SW_BPF_OUTPUT确保这个事件用来采集bpf的输出。 PERF_TYPE_MAX通常指示创建kprobe/uprobe事件,也就是用户程序使用kprobe的途径之一,用户程序可以将eBPF程序绑定在这个事件上
同样的,perf不同的事件也实现定义的接口:
pub trait PerfEventOps: Send + Sync + Debug + CastFromSync + CastFrom {
fn mmap(&self, _start: usize, _len: usize, _offset: usize) -> Result<()> {
panic!("mmap not implemented for PerfEvent");
}
fn set_bpf_prog(&self, _bpf_prog: Arc<File>) -> Result<()> {
panic!("set_bpf_prog not implemented for PerfEvent");
}
fn enable(&self) -> Result<()> {
panic!("enable not implemented");
}
fn disable(&self) -> Result<()> {
panic!("disable not implemented");
}
fn readable(&self) -> bool {
panic!("readable not implemented");
}
}
这个接口目前并不稳定。
helper函数支持
用户态工具通过系统调用和内核进行通信,完成eBPF数据的设置、交换。在内核中,eBPF程序的运行也需要内核的帮助,单独的eBPF程序并没有什么太大的用处,因此其会调用内核提供的helper 函数完成对内核资源的访问。
目前已经支持的大多数helper 函数是与Map操作相关:
/// Initialize the helper functions.
pub fn init_helper_functions() {
let mut map = BTreeMap::new();
unsafe {
// Map helpers::Generic map helpers
map.insert(1, define_func!(raw_map_lookup_elem));
map.insert(2, define_func!(raw_map_update_elem));
map.insert(3, define_func!(raw_map_delete_elem));
map.insert(164, define_func!(raw_map_for_each_elem));
map.insert(195, define_func!(raw_map_lookup_percpu_elem));
// map.insert(93,define_func!(raw_bpf_spin_lock);
// map.insert(94,define_func!(raw_bpf_spin_unlock);
// Map helpers::Perf event array helpers
map.insert(25, define_func!(raw_perf_event_output));
// Probe and trace helpers::Memory helpers
map.insert(4, define_func!(raw_bpf_probe_read));
// Print helpers
map.insert(6, define_func!(trace_printf));
// Map helpers::Queue and stack helpers
map.insert(87, define_func!(raw_map_push_elem));
map.insert(88, define_func!(raw_map_pop_elem));
map.insert(89, define_func!(raw_map_peek_elem));
}
BPF_HELPER_FUN_SET.init(map);
}